Davide Sganzerla 박사 편집
한 발로 균형을 유지하고 파트너를 미십시오(그림 40).

그림 40
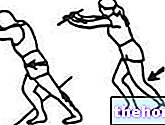
전진 제동 전진 런지(그림 41-42);


눈가리개를 하고 앞으로 런지를 제동하면서 앞으로 런지(그림 43-44).


측면 런지에서 제동을 통한 측면 이동(그림 45-46);


측면 런지에서 제동이 있는 붕대 측면 스트로크(그림 47-48).


3. 정제를 사용한 자연 부하 운동
수평으로 배치된 테이블에서 양발 지지대의 평형 연구(그림 49);
수직으로 배치된 테이블에서 양각 지지대의 평형 연구(그림 50);
대각선으로 배치된 테이블에서 양발 지지대의 평형 연구(그림 51);



그림 51
원형 정제에 대한 양발 지지대의 평형 연구(그림 52);
Bosu에서 두 발 지지대의 균형을 찾으십시오(그림 53).
2개의 다른 정제에서 두 발 지지대의 평형을 검색합니다(그림 54).



그림 54
수평으로 배치된 테이블에서 모노포달 지지대의 평형 연구(그림 55);
수직으로 위치한 테이블에서 모노포달릭 지지대의 평형 연구(그림 56);
대각선으로 배치된 테이블에서 모노포달 지지대의 평형 연구(그림 57);



그림 57
"고유수용성 운동 - 3부"에 대한 다른 기사
- 두 번째 부분 고유수용성 운동
- 고유수용성 훈련
- 고유수용성 운동
- 고유수용성 운동 네 번째 부분
- 고유수용성 운동 5부
- 고유수용성 운동 여섯 번째 부분
- 고유 감각 운동 일곱 번째 부분